


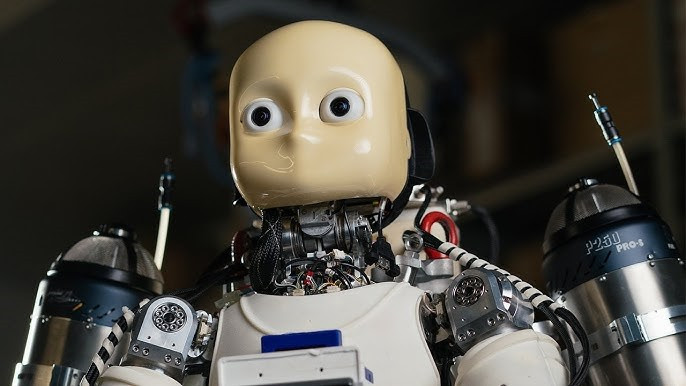
Một robot hình người có khả năng bay – điều tưởng chừng chỉ có trong phim viễn tưởng – vừa chính thức trở thành hiện thực. Được Viện Công nghệ Italy (IIT) phát triển, iRonCub3 là nguyên mẫu đầu tiên trên thế giới kết hợp hình dáng con người với động cơ phản lực, mở ra chương mới cho lĩnh vực robot đa năng.
Hiện tại, iRonCub3 mới chỉ có thể bay cách mặt đất khoảng 50cm và giữ thăng bằng, nhưng vẫn được đánh giá là cột mốc đáng kể. Robot được thiết kế để di chuyển cả trên mặt đất và trên không, giúp mở rộng khả năng hoạt động trong môi trường phức tạp như vùng thiên tai, khu vực độc hại hoặc những nơi con người khó tiếp cận.
Bay bằng động cơ phản lực
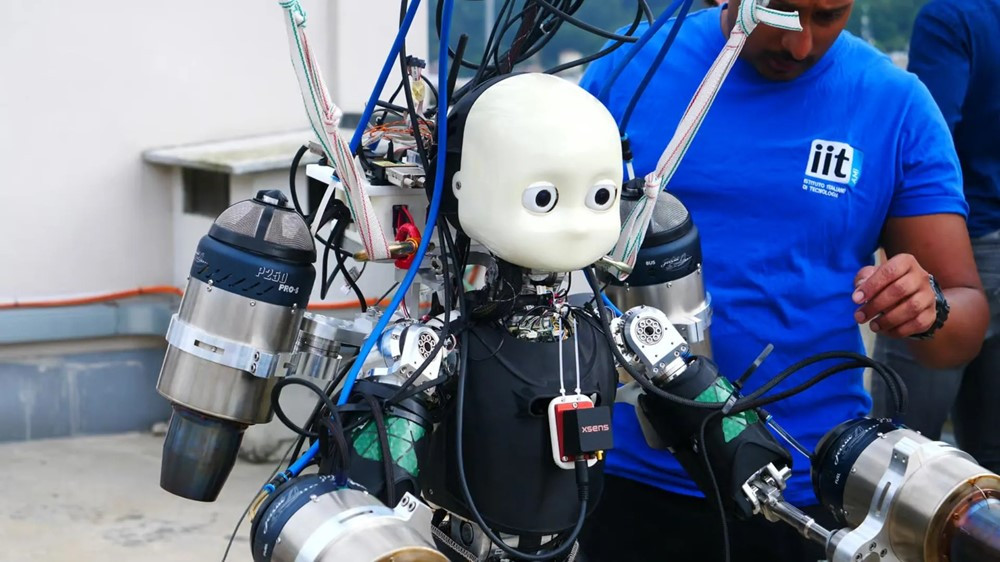
Dựa trên nền tảng robot iCub thế hệ thứ ba, iRonCub3 nặng 70kg và được điều khiển từ xa. Nó sở hữu 4 động cơ phản lực – hai gắn ở tay và hai tích hợp trong balô – giúp giữ thăng bằng và bay ổn định kể cả trong điều kiện có gió hoặc va chạm vật lý.
Lực đẩy của các động cơ vượt ngưỡng 1.000 newton. Tuy nhiên, khí xả có thể đạt nhiệt độ tới 800°C, buộc các nhà nghiên cứu phải thiết kế một bộ khung bằng titan cùng lớp phủ cách nhiệt chuyên dụng để bảo vệ hệ thống.
Đây là thành quả của hơn 2 năm làm việc liên tục, theo chia sẻ từ ông Daniele Pucci, người đứng đầu Phòng thí nghiệm AI và Cơ khí (AMI) của IIT. Khác với những robot hình người thông thường, iRonCub3 được thiết kế để “biết bay”, đồng nghĩa với hàng loạt thách thức kỹ thuật chưa từng có.
Khi robot hình người không cân xứng
Một trong những khó khăn lớn nhất là khả năng giữ ổn định khi bay. Trong khi drone thông thường có cấu trúc đối xứng và trọng tâm cố định, iRonCub3 có tay chân chuyển động linh hoạt và thân dài, tạo ra trọng tâm động không ổn định. Để giải quyết, nhóm phát triển đã xây dựng mô hình điều khiển bay tiên tiến cùng hệ thống dự đoán khí động học theo thời gian thực.
IIT cũng hợp tác với Đại học Bách khoa Milan để thử nghiệm trong hầm gió và phối hợp với Đại học Stanford nhằm ứng dụng AI. Theo Antonello Paolino, tác giả chính của nghiên cứu, mạng neuron nhân tạo được huấn luyện bằng dữ liệu mô phỏng và thực nghiệm đã được tích hợp vào hệ điều khiển trung tâm, giúp robot phản ứng linh hoạt trước dòng khí nhiễu loạn và thay đổi tư thế khi bay.
Cất cánh trong môi trường khắc nghiệt
Nhóm nghiên cứu áp dụng phương pháp “đồng thiết kế” – tối ưu hình dáng và vị trí động cơ cùng lúc – để robot có thể chịu được điều kiện khí động học và nhiệt độ khắc nghiệt. Quá trình này đòi hỏi hàng loạt mô phỏng, tinh chỉnh và thử nghiệm liên tục. Các cải tiến gần đây bao gồm hệ thống cảm biến lực đẩy, giải pháp tản nhiệt, cũng như tính năng lập kế hoạch tự động cho quá trình cất và hạ cánh.
Các thử nghiệm đầu tiên đã được tiến hành thành công tại phòng lab của IIT, nơi iRonCub3 có thể bay lơ lửng ổn định. Trong thời gian tới, robot sẽ tiếp tục được thử nghiệm tại sân bay Genoa với khu vực bay chuyên biệt do hãng Aeroporto di Genova hỗ trợ.
Dù còn ở giai đoạn phát triển, iRonCub3 đã cho thấy tiềm năng rõ rệt trong các nhiệm vụ đòi hỏi khả năng vừa bay vừa thao tác – từ cứu hộ trong khu vực thảm họa đến làm việc trong môi trường nguy hiểm.
{kind=link}